
Transmissor
O futebol de robôs proposto pela UFJF ainda permite intervenção humana e este texto foi elaborado de acordo com as regras.
Os participantes, no entanto, devem compreender que este estágio é importante para a concepção de um futuro futebol autônomo, ou seja, sem intervenção humana.
Diagrama de Blocos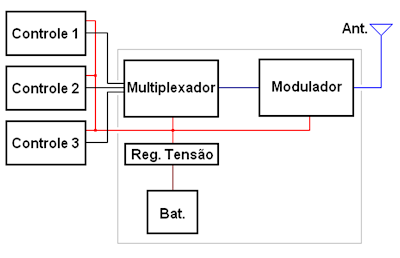
Os participantes, no entanto, devem compreender que este estágio é importante para a concepção de um futuro futebol autônomo, ou seja, sem intervenção humana.
Diagrama de Blocos


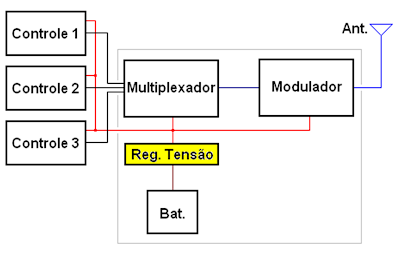
Regulador de Tensão
Muitos componentes exigem uma tensão CC, estável e de 5V. A associação em série de duas baterias BMC3 (comuns em celular) fornece um valor CC, estável, mas com o valor diferente de 5V.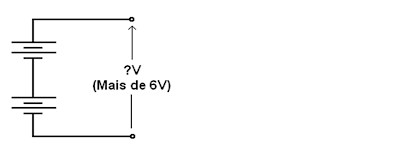

Precisamos, para este circuito, de uma tensão de 5V CC e estável. Para isso, podemos utilizar um circuito integrado conhecido como LM7805 (ou apenas 7805).
 O LM7805 possui o encapsulamento TO220, comuns em transistores.
O LM7805 possui o encapsulamento TO220, comuns em transistores.
O pino 1 é o de entrada e deve ser conectado ao positivo da bateria. O pino 2 deve ser conectado ao barramento de referência. Dessa forma, o pino 3 fornece 5 volts em relação a referência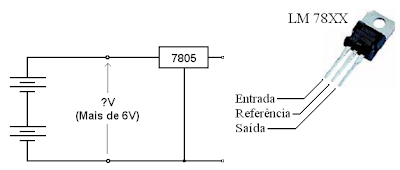

Para o bom funcionamento, a tensão de entrada deve ser superior do que 6V. O componente também possui um valor máximo de tensão na entrada (verificar o Datasheet).
 O componente se apresenta bem estável, dependendo do circuito. No entanto, é comum utilizarmos capacitores de filtro de tensão a fim de garantir a estabilidade.
O componente se apresenta bem estável, dependendo do circuito. No entanto, é comum utilizarmos capacitores de filtro de tensão a fim de garantir a estabilidade. Diagrama de Blocos
Diagrama de Blocos
 Controle
ControlePrecisamos de algumas botoeiras para enviar a informação ao transmissor. O Número de botoeiras irá depender da criatividade do grupo.
Para comandar frente, ré, giro para direita e giro para esquerda, podemos utilizar quatro botoeiras. Joystics, com algumas alterações internas, poderão ser utilizados.
Para comandar frente, ré, giro para direita e giro para esquerda, podemos utilizar quatro botoeiras. Joystics, com algumas alterações internas, poderão ser utilizados.
 Nesta simulação, utilizaremos um fio com 5V vindo do regulador (Vermelho - Repare o Diagrama de Blocos) e quatro de retorno, sendo um para a informação de frente, outro de giro esquerdo, giro direito e ré.
Nesta simulação, utilizaremos um fio com 5V vindo do regulador (Vermelho - Repare o Diagrama de Blocos) e quatro de retorno, sendo um para a informação de frente, outro de giro esquerdo, giro direito e ré. Pressionando a botoeira referente a informação de frente, estaremos ligando o retorno ao barramento de 5V, ou seja, elevando ele para nível lógico alto(1).
Pressionando a botoeira referente a informação de frente, estaremos ligando o retorno ao barramento de 5V, ou seja, elevando ele para nível lógico alto(1).
 Observe que pressionando outra botoeira, estaremos enviando nível lógico alto no respectivo retorno.
Observe que pressionando outra botoeira, estaremos enviando nível lógico alto no respectivo retorno. Diagrama de Blocos
Diagrama de Blocos

Multiplexador
O “multiplexador” é responsável por verificar as informações vindas dos controles, codificar em informações alfa-numéricas e multiplexar as informações.
Para realizar estas funções, utilizaremos um um micro-controlador. Este texto utiliza o PIC16F628 da MicroChip. Outros CI’s podem ser utilizados.
Para realizar estas funções, utilizaremos um um micro-controlador. Este texto utiliza o PIC16F628 da MicroChip. Outros CI’s podem ser utilizados.
 Precisamos alimentar o CI ligando o Vdd no barramento de 5V e o Vss no GND.
Precisamos alimentar o CI ligando o Vdd no barramento de 5V e o Vss no GND. Os pinos de transmissão e recepção são determinados. Vamos separar o de transmissão que deverá enviar as informações de saída para o modulador de RF (rádio-frequência).
Os pinos de transmissão e recepção são determinados. Vamos separar o de transmissão que deverá enviar as informações de saída para o modulador de RF (rádio-frequência). Este micro-controlador possui clock interno. No entanto, transmitir dados por RF exige muita precisão. Para garantir a precisão, utilizaremos um clock externo fornecido por um cristal.
Este micro-controlador possui clock interno. No entanto, transmitir dados por RF exige muita precisão. Para garantir a precisão, utilizaremos um clock externo fornecido por um cristal. Os pinos referentes ao clock também são determinados. Por este motivo, utilizaremos eles na função ocupando mais dois pinos.
Os pinos referentes ao clock também são determinados. Por este motivo, utilizaremos eles na função ocupando mais dois pinos. Utilizaremos 4 dos pinos que sobraram como entrada para as informações do controle 1.
Utilizaremos 4 dos pinos que sobraram como entrada para as informações do controle 1.
Repare que quando uma botoeira é pressionada, um nível lógico alto chega a um pino do CI.
 Uma observação interessante é que quando as botoeiras não estão pressionadas, os pinos estão flutuando deixando o sistema indeterminado.
Uma observação interessante é que quando as botoeiras não estão pressionadas, os pinos estão flutuando deixando o sistema indeterminado. Uma maneira de garantir o nível lógico baixo é inserindo resistores no circuito.
Uma maneira de garantir o nível lógico baixo é inserindo resistores no circuito.Por último, precisamos determinar a operação do micro-controlador, ou seja, programá-lo.A programação é tópico de outro encontro. Para não ficar vago, vamos realizar uma programação em “portugol” para este circuito. Dessa forma, ficará fácil compreender o que estamos fazendo

Entrada A2 igual a frente
Entrada A3 igual a direita
Entrada A4 igual a esquerda
Entrada A5 igual a ré
Se (frente == baixo e direita == baixo e esquerda == baixo e ré == baixo)
Enviar a
/* "a" manda o robô 1 parar */
Se (frente == alto e direita == baixo e esquerda == baixo e ré == baixo)
Enviar b
/* "b" manda o robô 1 girar os dois motores para frente */
Se (frente == baixo e direita == alto e esquerda == baixo e ré == baixo)
Enviar c
/* "c" manda o robô 1 girar apenas o motor direito para frente */
As informações enviadas “a”, “b”, “c” ... são um conjunto de bits que representam esses caracteres no sistema alfa-numérico (já comentamos sobre isto no primeiro encontro). O robô estará programado a responder de acordo com estas informações.
No entanto, precisamos inserir as informações em uma portadora de alta frequência para que a informação consiga ser enviada pelo ar.
No entanto, precisamos inserir as informações em uma portadora de alta frequência para que a informação consiga ser enviada pelo ar.
Diagrama de Blocos

 Modulador
ModuladorO modulador, também conhecido como módulo de RF, é vendido pronto. Utilizamos um da KMark pela facilidade e preço.
 Laipac Tech
Laipac TechRF MODULES
Precisamos apenas alimentar corretamente. O circuito modula a informação presente no pino data. É necessário uma antena conectada no pino ant para enviar para os robôs.
O projeto da antena é simples. Apenas um pedaço de fio rígido. Acredito que dobras ou voltas podem gerar alta impedância atenuando o sinal a ser enviado.
 O tamanho do fio pode ser determinado conhecendo a frequência da portadora.
O tamanho do fio pode ser determinado conhecendo a frequência da portadora. Onde V é a velocidade da luz em m/s e f a frequência da portadora em Hz.
Onde V é a velocidade da luz em m/s e f a frequência da portadora em Hz.Para os valores de 315MHz e 434MHz, o comprimento da antena é muito grande. Podemos dividir o valor obtido de d por 2, 4 ou 8.
Devemos evitar ângulos retos e agudos nas trilhas da placa de circuito impresso (pelo mesmo motivo, evitar impedâncias).
Conclusão
As informações citadas neste encontro são a base para o projeto de um transmissor faltando apenas a programação.
Trabalho de Fiorelo R. C. Filho
Conclusão
As informações citadas neste encontro são a base para o projeto de um transmissor faltando apenas a programação.
Trabalho de Fiorelo R. C. Filho



Um comentário:
Este mundo da engenharia! Para dar um tom mais jornalístico a este tipo de post, é legal escrever uma introdução, destacando o autor do trabalho e resumindo a proposta. Ajuda a situar o leitor. No mais, este blog já está precisando virar site...
Postar um comentário